
In the fast-moving world of changing autonomous vehicles, combining high technologies is essential to making self-driving cars a concept for the future and a reality on roads. Automotive Edge computing is critical for autonomous automobiles to function in real time and be safe and effective. This post will elaborate on the importance of edge computing for autonomous vehicles and its primary features, advantages, and disadvantages. It will also discuss the future impact of edge computing on the development of autonomous cars.
Covered Contents
ToggleWhat is edge computing?
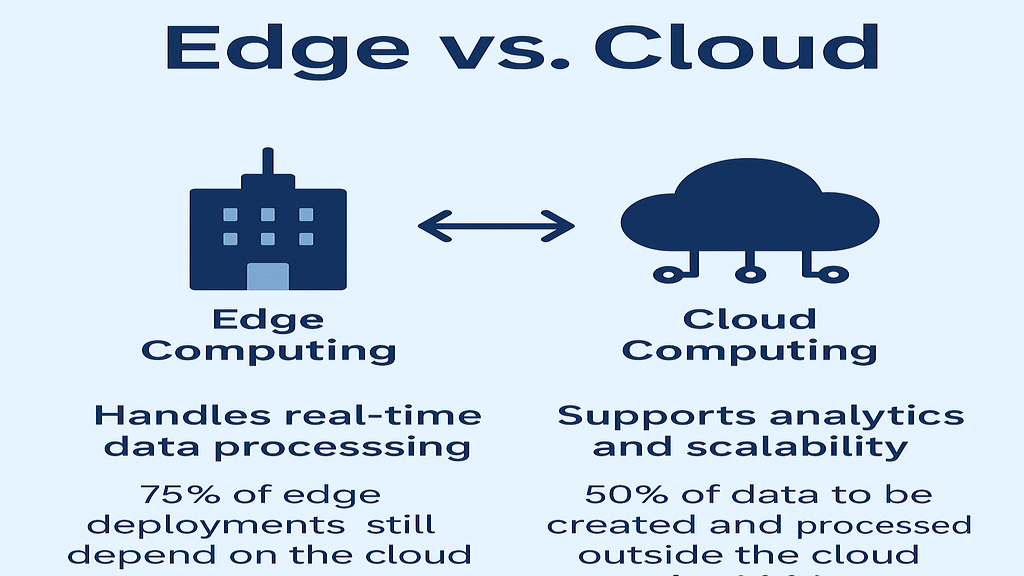
Let’s step back a little bit before getting into the application of such a concept in an autonomous vehicle. Edge computing refers to processing information closer to the point of the source rather than just streaming it away to the centralized cloud or even to a data center for further processing.
This results in faster computations, reduced latency, and less dependence on network connectivity.
Edge computing for autonomous cars helps process real-time data from sensors, cameras, LiDAR, and radar in enormous chunks. This is because it would enable the vehicle to make instantaneous decisions, thus making it increasingly capable of navigating roads more effectively, avoiding obstacles better, and keeping the passengers even safer.
Autonomous vehicles require enormous amounts of data to function. From pedestrian detection to other vehicle detection to understanding road conditions, a self-driving car relies on real-time information to make critical decisions. The integration of edge computing in autonomous vehicles is crucial because it addresses several key challenges that autonomous vehicles face.
Learn more:
Edge Computing: A Simple Guide for Beginners
Key Challenges:
Latency Reduction for Real-Time Decision Making:
Minimized lag period between data generation and process stage with edge computing. The autonomous vehicle must make time-driven, split-second choices to avoid collisions for smooth navigation through traffic law compliance in complex traffic environments. Processing locally on the vehicle ensures that this information is now available almost instantly.
Thus, the self-driving car would necessarily remain dependent on the cloud, most certainly further more from the location of occurrence, leading to delay and causing instances of potential hazards.
Data Privacy and Security:
Autonomous vehicles produce a huge amount of sensitive data related to passengers, routes, and driving patterns. Edge computing, therefore, assures that such data is handled locally and, hence, lowers the risk of data breaches.
Since sensitive information does not need to travel through networks, edge computing in autonomous vehicles provides better privacy protection.
Reliability and Availability:
Any autonomous vehicle would be a disaster if it had cloud-based systems, which are prone to downtime and connectivity. In contrast, edge computing guarantees operation since once the connection with the cloud has been lost, it will continue with the locally stored and processed data.
This places edge computing as an inevitable element to be maintained in reliable and available self-driving cars.
Bandwidth Optimization:
Autonomous cars emit tremendous quantities of data using cameras, radars, and sensors. Relaying it to the cloud may end up requiring extensive bandwidth, thus increasing latency.
Edge computing enables computation of local data, and only critical results have to be uploaded back to the cloud to prevent much retransmission that could ultimately optimize bandwidth use on the autonomous vehicle.
How does edge computing work on autonomous vehicles?
Edge computing in self-driving vehicles involves a variety of technologies and processes that collectively facilitate the working of the vehicle. Here’s how it is used in an average autonomous car:
Data Collection:
Radar, LiDAR, cameras, and ultrasonic sensors are just a few of the numerous sensors found in self-driving cars. These sensors gather information from the vehicle’s surroundings, such as the existence of nearby automobiles, pedestrians, traffic lights, and road signs.
Local Data Processing:
Edge computing does the processing of the collected data on the vehicle itself using powerful onboard computers, which enables the vehicle to analyze this data in real-time decisions accordingly.
The vehicle can make an appropriate decision to avoid hitting a pedestrian crossing the road because its onboard sensors have detected the pedestrian crossing.
Decision-Making and Actuation:
After processing the data, the vehicle’s onboard system chooses the action to take, that is, to turn left or right, stop, or accelerate. This is locally computed with little latency, hence crucial for safety in high-velocity traffic situations.
Communication with the Cloud:
While edge computing handles most of the data processing locally, there will still be times when the vehicle needs to reach out to the cloud for activities such as software updates or sending in aggregated data for further analysis. However, this will happen less frequently, so it will not depend as much on continuous network connectivity.
Benefits of Edge Computing in Autonomous Vehicles
There are several advantages of edge computing integration in self-driving cars, which are necessary for the operation of autonomous vehicles:
Speed and Efficiency:
Through edge computing, data is processed locally in autonomous vehicles, thus making it possible to react to any change in their environment instantaneously. This is especially critical in driving through complex urban environments or in high-speed maneuvers.
Improved Safety:
Real-time data processing and decision-making can help ensure that autonomous vehicles avoid collisions with pedestrians or animals. Edge computing makes these decisions quickly and accurately and improves the safety of both passengers and pedestrians.
Cost Effectiveness:
Since edge computing decreases the dependency on constant communication with the cloud, it can reduce the costs involved in transmitting data and infrastructure in the cloud. This is what would make autonomous vehicle technology accessible and scalable in the long run.
Scalability:
As the number of self-driving cars rises, so will the requirement to process this amount of data. With edge computing, the technology will be scalable, as every car processes data locally without a surge in the cloud system.
Challenges of Edge Computing for Autonomous Vehicles
With these benefits, however, edge computing in self-driving vehicles also presents some challenges.
Limited Computing Power:
The edge devices of an autonomous vehicle need to be able to compute high amounts of data quickly. But, still, these edge devices’ computational resources can be less powerful than cloud-based servers, and sometimes, it might result in reduced performance.
Data Synchronization:
When processing data locally, the vehicle’s systems must be kept in sync with the cloud and other vehicles. Good communication and data synchronization are very important for tasks such as traffic management and vehicle-to-vehicle communication.
Security Concerns:
Although edge computing provides better data privacy, it also raises security concerns. The edge devices in the vehicle are vulnerable to cyber attacks, which may jeopardize both the safety and functionality of the vehicle. Strong security measures for these devices are also required.
Development is Expensive:
The hardware and software for the implementation of edge computing in autonomous vehicles are likely to be expensive. While the long-term returns will be greater than the investment, the high costs of development and deployment could make it less accessible on a mass scale.
The relevance of edge computing in autonomous vehicles will only grow as technology develops. Furthermore, edge computing may eventually make it possible for self-driving automobiles to have advanced features like:
Advanced Features:
V2V, or vehicle-to-vehicle communication:
To coordinate movements and prevent collisions, autonomous cars could communicate with one another in real time.
Better Machine Learning:
With the aid of edge computing, machine learning algorithms will be applied to enable the cars to make better decisions over time on their own.
Enhanced ADAS:
Edge computing is going to improve features like adaptive cruise control and lane-keeping assistance. Data processing is done more effectively in these systems.
Conclusion
Edge computing in autonomous vehicles proves crucial for the safe operation, efficiency, and timely movement of these vehicles.
This can help make decisions faster, increase safety, reduce cloud dependency, and optimize data processing. Although there are problems that need to be solved, it is quite dependent on the further development and implementation of edge computing regarding the future of autonomous vehicles. The more advanced the self-driving technology gets, the more advanced edge computing will be; hence, more exciting things can be anticipated in transportation.

3 thoughts on “Edge computing: Role in autonomous vehicles”